mirror of
https://github.com/zhigang1992/react-native.git
synced 2026-04-13 22:43:59 +08:00
Summary: This PR fixes an issue with rotation decomposition matrix on android. The issue can be illustrated with this sample code https://snack.expo.io/r1SHEJpVb It surfaces when we have non-zero rotation in Y or X axis and when rotation Z is greater than 90deg or less than -90deg. In that case the decomposition code doesn't give a valid output and as a result the view gets rotated by 180deg in Z axis. You may want to run the code linked above on android and iOS to see the difference. Basically the example app renders first image rotated only by 89deg and the next one by 91deg. As a result you should see the second view being pivoted just slightly more than the first image. Apparently on android the second image is completely flipped: iOS: 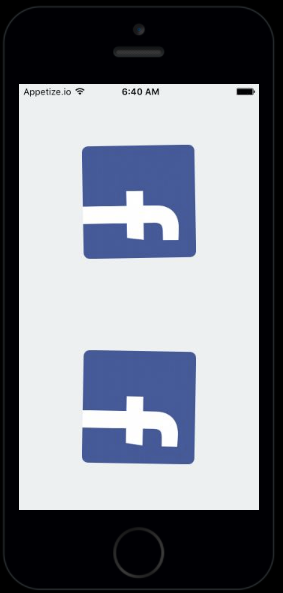 Android: 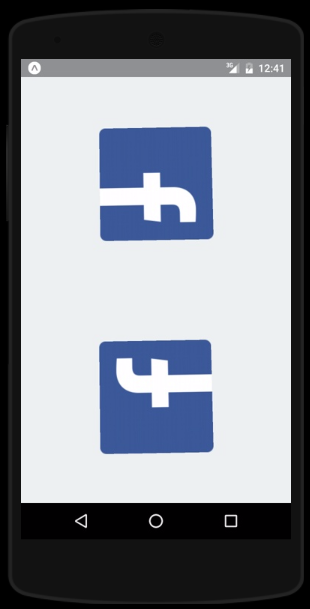 The bug seemed to be caused by the code that decomposes the matrix into axis angles. It seems like that whole code has been overly complicated and we've been converting matrix first into quaternion just to extract angles. Whereas it is sufficient to extract angles directly from rotation matrix as described here: http://nghiaho.com/?page_id=846 This formula produces way simpler code and also gives correct result in the aforementioned case, so I decided not to debug quaternion code any further. sidenote: New formula's y angle output range is now -90 to 90deg hence changes in tests. Closes https://github.com/facebook/react-native/pull/14888 Reviewed By: astreet Differential Revision: D5414006 Pulled By: shergin fbshipit-source-id: 2e0a68cf4b2a9e32f10f6bfff2d484867a337fa3
{kind=link}
{kind=link}
388 lines
14 KiB
Java
388 lines
14 KiB
Java
package com.facebook.react.uimanager;
|
|
|
|
import com.facebook.infer.annotation.Assertions;
|
|
|
|
/**
|
|
* Provides helper methods for converting transform operations into a matrix and then into a list
|
|
* of translate, scale and rotate commands.
|
|
*/
|
|
public class MatrixMathHelper {
|
|
|
|
private static final double EPSILON = .00001d;
|
|
|
|
public static class MatrixDecompositionContext {
|
|
double[] perspective = new double[4];
|
|
double[] scale = new double[3];
|
|
double[] skew = new double[3];
|
|
double[] translation = new double[3];
|
|
double[] rotationDegrees = new double[3];
|
|
}
|
|
|
|
private static boolean isZero(double d) {
|
|
if (Double.isNaN(d)) {
|
|
return false;
|
|
}
|
|
return Math.abs(d) < EPSILON;
|
|
}
|
|
|
|
public static void multiplyInto(double[] out, double[] a, double[] b) {
|
|
double a00 = a[0], a01 = a[1], a02 = a[2], a03 = a[3],
|
|
a10 = a[4], a11 = a[5], a12 = a[6], a13 = a[7],
|
|
a20 = a[8], a21 = a[9], a22 = a[10], a23 = a[11],
|
|
a30 = a[12], a31 = a[13], a32 = a[14], a33 = a[15];
|
|
|
|
double b0 = b[0], b1 = b[1], b2 = b[2], b3 = b[3];
|
|
out[0] = b0*a00 + b1*a10 + b2*a20 + b3*a30;
|
|
out[1] = b0*a01 + b1*a11 + b2*a21 + b3*a31;
|
|
out[2] = b0*a02 + b1*a12 + b2*a22 + b3*a32;
|
|
out[3] = b0*a03 + b1*a13 + b2*a23 + b3*a33;
|
|
|
|
b0 = b[4]; b1 = b[5]; b2 = b[6]; b3 = b[7];
|
|
out[4] = b0*a00 + b1*a10 + b2*a20 + b3*a30;
|
|
out[5] = b0*a01 + b1*a11 + b2*a21 + b3*a31;
|
|
out[6] = b0*a02 + b1*a12 + b2*a22 + b3*a32;
|
|
out[7] = b0*a03 + b1*a13 + b2*a23 + b3*a33;
|
|
|
|
b0 = b[8]; b1 = b[9]; b2 = b[10]; b3 = b[11];
|
|
out[8] = b0*a00 + b1*a10 + b2*a20 + b3*a30;
|
|
out[9] = b0*a01 + b1*a11 + b2*a21 + b3*a31;
|
|
out[10] = b0*a02 + b1*a12 + b2*a22 + b3*a32;
|
|
out[11] = b0*a03 + b1*a13 + b2*a23 + b3*a33;
|
|
|
|
b0 = b[12]; b1 = b[13]; b2 = b[14]; b3 = b[15];
|
|
out[12] = b0*a00 + b1*a10 + b2*a20 + b3*a30;
|
|
out[13] = b0*a01 + b1*a11 + b2*a21 + b3*a31;
|
|
out[14] = b0*a02 + b1*a12 + b2*a22 + b3*a32;
|
|
out[15] = b0*a03 + b1*a13 + b2*a23 + b3*a33;
|
|
}
|
|
|
|
/**
|
|
* @param transformMatrix 16-element array of numbers representing 4x4 transform matrix
|
|
*/
|
|
public static void decomposeMatrix(double[] transformMatrix, MatrixDecompositionContext ctx) {
|
|
Assertions.assertCondition(transformMatrix.length == 16);
|
|
|
|
// output values
|
|
final double[] perspective = ctx.perspective;
|
|
final double[] scale = ctx.scale;
|
|
final double[] skew = ctx.skew;
|
|
final double[] translation = ctx.translation;
|
|
final double[] rotationDegrees = ctx.rotationDegrees;
|
|
|
|
// create normalized, 2d array matrix
|
|
// and normalized 1d array perspectiveMatrix with redefined 4th column
|
|
if (isZero(transformMatrix[15])) {
|
|
return;
|
|
}
|
|
double[][] matrix = new double[4][4];
|
|
double[] perspectiveMatrix = new double[16];
|
|
for (int i = 0; i < 4; i++) {
|
|
for (int j = 0; j < 4; j++) {
|
|
double value = transformMatrix[(i * 4) + j] / transformMatrix[15];
|
|
matrix[i][j] = value;
|
|
perspectiveMatrix[(i * 4) + j] = j == 3 ? 0 : value;
|
|
}
|
|
}
|
|
perspectiveMatrix[15] = 1;
|
|
|
|
// test for singularity of upper 3x3 part of the perspective matrix
|
|
if (isZero(determinant(perspectiveMatrix))) {
|
|
return;
|
|
}
|
|
|
|
// isolate perspective
|
|
if (!isZero(matrix[0][3]) || !isZero(matrix[1][3]) || !isZero(matrix[2][3])) {
|
|
// rightHandSide is the right hand side of the equation.
|
|
// rightHandSide is a vector, or point in 3d space relative to the origin.
|
|
double[] rightHandSide = { matrix[0][3], matrix[1][3], matrix[2][3], matrix[3][3] };
|
|
|
|
// Solve the equation by inverting perspectiveMatrix and multiplying
|
|
// rightHandSide by the inverse.
|
|
double[] inversePerspectiveMatrix = inverse(
|
|
perspectiveMatrix
|
|
);
|
|
double[] transposedInversePerspectiveMatrix = transpose(
|
|
inversePerspectiveMatrix
|
|
);
|
|
multiplyVectorByMatrix(rightHandSide, transposedInversePerspectiveMatrix, perspective);
|
|
} else {
|
|
// no perspective
|
|
perspective[0] = perspective[1] = perspective[2] = 0d;
|
|
perspective[3] = 1d;
|
|
}
|
|
|
|
// translation is simple
|
|
for (int i = 0; i < 3; i++) {
|
|
translation[i] = matrix[3][i];
|
|
}
|
|
|
|
// Now get scale and shear.
|
|
// 'row' is a 3 element array of 3 component vectors
|
|
double[][] row = new double[3][3];
|
|
for (int i = 0; i < 3; i++) {
|
|
row[i][0] = matrix[i][0];
|
|
row[i][1] = matrix[i][1];
|
|
row[i][2] = matrix[i][2];
|
|
}
|
|
|
|
// Compute X scale factor and normalize first row.
|
|
scale[0] = v3Length(row[0]);
|
|
row[0] = v3Normalize(row[0], scale[0]);
|
|
|
|
// Compute XY shear factor and make 2nd row orthogonal to 1st.
|
|
skew[0] = v3Dot(row[0], row[1]);
|
|
row[1] = v3Combine(row[1], row[0], 1.0, -skew[0]);
|
|
|
|
// Compute XY shear factor and make 2nd row orthogonal to 1st.
|
|
skew[0] = v3Dot(row[0], row[1]);
|
|
row[1] = v3Combine(row[1], row[0], 1.0, -skew[0]);
|
|
|
|
// Now, compute Y scale and normalize 2nd row.
|
|
scale[1] = v3Length(row[1]);
|
|
row[1] = v3Normalize(row[1], scale[1]);
|
|
skew[0] /= scale[1];
|
|
|
|
// Compute XZ and YZ shears, orthogonalize 3rd row
|
|
skew[1] = v3Dot(row[0], row[2]);
|
|
row[2] = v3Combine(row[2], row[0], 1.0, -skew[1]);
|
|
skew[2] = v3Dot(row[1], row[2]);
|
|
row[2] = v3Combine(row[2], row[1], 1.0, -skew[2]);
|
|
|
|
// Next, get Z scale and normalize 3rd row.
|
|
scale[2] = v3Length(row[2]);
|
|
row[2] = v3Normalize(row[2], scale[2]);
|
|
skew[1] /= scale[2];
|
|
skew[2] /= scale[2];
|
|
|
|
// At this point, the matrix (in rows) is orthonormal.
|
|
// Check for a coordinate system flip. If the determinant
|
|
// is -1, then negate the matrix and the scaling factors.
|
|
double[] pdum3 = v3Cross(row[1], row[2]);
|
|
if (v3Dot(row[0], pdum3) < 0) {
|
|
for (int i = 0; i < 3; i++) {
|
|
scale[i] *= -1;
|
|
row[i][0] *= -1;
|
|
row[i][1] *= -1;
|
|
row[i][2] *= -1;
|
|
}
|
|
}
|
|
|
|
// Now, get the rotations out
|
|
// Based on: http://nghiaho.com/?page_id=846
|
|
double conv = 180 / Math.PI;
|
|
rotationDegrees[0] = roundTo3Places(-Math.atan2(row[2][1], row[2][2]) * conv);
|
|
rotationDegrees[1] = roundTo3Places(-Math.atan2(-row[2][0], Math.sqrt(row[2][1] * row[2][1] + row[2][2] * row[2][2])) * conv);
|
|
rotationDegrees[2] = roundTo3Places(-Math.atan2(row[1][0], row[0][0]) * conv);
|
|
}
|
|
|
|
public static double determinant(double[] matrix) {
|
|
double m00 = matrix[0], m01 = matrix[1], m02 = matrix[2], m03 = matrix[3], m10 = matrix[4],
|
|
m11 = matrix[5], m12 = matrix[6], m13 = matrix[7], m20 = matrix[8], m21 = matrix[9],
|
|
m22 = matrix[10], m23 = matrix[11], m30 = matrix[12], m31 = matrix[13], m32 = matrix[14],
|
|
m33 = matrix[15];
|
|
return (
|
|
m03 * m12 * m21 * m30 - m02 * m13 * m21 * m30 -
|
|
m03 * m11 * m22 * m30 + m01 * m13 * m22 * m30 +
|
|
m02 * m11 * m23 * m30 - m01 * m12 * m23 * m30 -
|
|
m03 * m12 * m20 * m31 + m02 * m13 * m20 * m31 +
|
|
m03 * m10 * m22 * m31 - m00 * m13 * m22 * m31 -
|
|
m02 * m10 * m23 * m31 + m00 * m12 * m23 * m31 +
|
|
m03 * m11 * m20 * m32 - m01 * m13 * m20 * m32 -
|
|
m03 * m10 * m21 * m32 + m00 * m13 * m21 * m32 +
|
|
m01 * m10 * m23 * m32 - m00 * m11 * m23 * m32 -
|
|
m02 * m11 * m20 * m33 + m01 * m12 * m20 * m33 +
|
|
m02 * m10 * m21 * m33 - m00 * m12 * m21 * m33 -
|
|
m01 * m10 * m22 * m33 + m00 * m11 * m22 * m33
|
|
);
|
|
}
|
|
|
|
/**
|
|
* Inverse of a matrix. Multiplying by the inverse is used in matrix math
|
|
* instead of division.
|
|
*
|
|
* Formula from:
|
|
* http://www.euclideanspace.com/maths/algebra/matrix/functions/inverse/fourD/index.htm
|
|
*/
|
|
public static double[] inverse(double[] matrix) {
|
|
double det = determinant(matrix);
|
|
if (isZero(det)) {
|
|
return matrix;
|
|
}
|
|
double m00 = matrix[0], m01 = matrix[1], m02 = matrix[2], m03 = matrix[3], m10 = matrix[4],
|
|
m11 = matrix[5], m12 = matrix[6], m13 = matrix[7], m20 = matrix[8], m21 = matrix[9],
|
|
m22 = matrix[10], m23 = matrix[11], m30 = matrix[12], m31 = matrix[13], m32 = matrix[14],
|
|
m33 = matrix[15];
|
|
return new double[] {
|
|
(m12 * m23 * m31 - m13 * m22 * m31 + m13 * m21 * m32 - m11 * m23 * m32 - m12 * m21 * m33 + m11 * m22 * m33) / det,
|
|
(m03 * m22 * m31 - m02 * m23 * m31 - m03 * m21 * m32 + m01 * m23 * m32 + m02 * m21 * m33 - m01 * m22 * m33) / det,
|
|
(m02 * m13 * m31 - m03 * m12 * m31 + m03 * m11 * m32 - m01 * m13 * m32 - m02 * m11 * m33 + m01 * m12 * m33) / det,
|
|
(m03 * m12 * m21 - m02 * m13 * m21 - m03 * m11 * m22 + m01 * m13 * m22 + m02 * m11 * m23 - m01 * m12 * m23) / det,
|
|
(m13 * m22 * m30 - m12 * m23 * m30 - m13 * m20 * m32 + m10 * m23 * m32 + m12 * m20 * m33 - m10 * m22 * m33) / det,
|
|
(m02 * m23 * m30 - m03 * m22 * m30 + m03 * m20 * m32 - m00 * m23 * m32 - m02 * m20 * m33 + m00 * m22 * m33) / det,
|
|
(m03 * m12 * m30 - m02 * m13 * m30 - m03 * m10 * m32 + m00 * m13 * m32 + m02 * m10 * m33 - m00 * m12 * m33) / det,
|
|
(m02 * m13 * m20 - m03 * m12 * m20 + m03 * m10 * m22 - m00 * m13 * m22 - m02 * m10 * m23 + m00 * m12 * m23) / det,
|
|
(m11 * m23 * m30 - m13 * m21 * m30 + m13 * m20 * m31 - m10 * m23 * m31 - m11 * m20 * m33 + m10 * m21 * m33) / det,
|
|
(m03 * m21 * m30 - m01 * m23 * m30 - m03 * m20 * m31 + m00 * m23 * m31 + m01 * m20 * m33 - m00 * m21 * m33) / det,
|
|
(m01 * m13 * m30 - m03 * m11 * m30 + m03 * m10 * m31 - m00 * m13 * m31 - m01 * m10 * m33 + m00 * m11 * m33) / det,
|
|
(m03 * m11 * m20 - m01 * m13 * m20 - m03 * m10 * m21 + m00 * m13 * m21 + m01 * m10 * m23 - m00 * m11 * m23) / det,
|
|
(m12 * m21 * m30 - m11 * m22 * m30 - m12 * m20 * m31 + m10 * m22 * m31 + m11 * m20 * m32 - m10 * m21 * m32) / det,
|
|
(m01 * m22 * m30 - m02 * m21 * m30 + m02 * m20 * m31 - m00 * m22 * m31 - m01 * m20 * m32 + m00 * m21 * m32) / det,
|
|
(m02 * m11 * m30 - m01 * m12 * m30 - m02 * m10 * m31 + m00 * m12 * m31 + m01 * m10 * m32 - m00 * m11 * m32) / det,
|
|
(m01 * m12 * m20 - m02 * m11 * m20 + m02 * m10 * m21 - m00 * m12 * m21 - m01 * m10 * m22 + m00 * m11 * m22) / det
|
|
};
|
|
}
|
|
|
|
/**
|
|
* Turns columns into rows and rows into columns.
|
|
*/
|
|
public static double[] transpose(double[] m) {
|
|
return new double[] {
|
|
m[0], m[4], m[8], m[12],
|
|
m[1], m[5], m[9], m[13],
|
|
m[2], m[6], m[10], m[14],
|
|
m[3], m[7], m[11], m[15]
|
|
};
|
|
}
|
|
|
|
/**
|
|
* Based on: http://tog.acm.org/resources/GraphicsGems/gemsii/unmatrix.c
|
|
*/
|
|
public static void multiplyVectorByMatrix(double[] v, double[] m, double[] result) {
|
|
double vx = v[0], vy = v[1], vz = v[2], vw = v[3];
|
|
result[0] = vx * m[0] + vy * m[4] + vz * m[8] + vw * m[12];
|
|
result[1] = vx * m[1] + vy * m[5] + vz * m[9] + vw * m[13];
|
|
result[2] = vx * m[2] + vy * m[6] + vz * m[10] + vw * m[14];
|
|
result[3] = vx * m[3] + vy * m[7] + vz * m[11] + vw * m[15];
|
|
}
|
|
|
|
/**
|
|
* From: https://code.google.com/p/webgl-mjs/source/browse/mjs.js
|
|
*/
|
|
public static double v3Length(double[] a) {
|
|
return Math.sqrt(a[0]*a[0] + a[1]*a[1] + a[2]*a[2]);
|
|
}
|
|
|
|
/**
|
|
* Based on: https://code.google.com/p/webgl-mjs/source/browse/mjs.js
|
|
*/
|
|
public static double[] v3Normalize(double[] vector, double norm) {
|
|
double im = 1 / (isZero(norm) ? v3Length(vector) : norm);
|
|
return new double[] {
|
|
vector[0] * im,
|
|
vector[1] * im,
|
|
vector[2] * im
|
|
};
|
|
}
|
|
|
|
/**
|
|
* The dot product of a and b, two 3-element vectors.
|
|
* From: https://code.google.com/p/webgl-mjs/source/browse/mjs.js
|
|
*/
|
|
public static double v3Dot(double[] a, double[] b) {
|
|
return a[0] * b[0] +
|
|
a[1] * b[1] +
|
|
a[2] * b[2];
|
|
}
|
|
|
|
/**
|
|
* From:
|
|
* http://www.opensource.apple.com/source/WebCore/WebCore-514/platform/graphics/transforms/TransformationMatrix.cpp
|
|
*/
|
|
public static double[] v3Combine(double[] a, double[] b, double aScale, double bScale) {
|
|
return new double[]{
|
|
aScale * a[0] + bScale * b[0],
|
|
aScale * a[1] + bScale * b[1],
|
|
aScale * a[2] + bScale * b[2]
|
|
};
|
|
}
|
|
|
|
/**
|
|
* From:
|
|
* http://www.opensource.apple.com/source/WebCore/WebCore-514/platform/graphics/transforms/TransformationMatrix.cpp
|
|
*/
|
|
public static double[] v3Cross(double[] a, double[] b) {
|
|
return new double[]{
|
|
a[1] * b[2] - a[2] * b[1],
|
|
a[2] * b[0] - a[0] * b[2],
|
|
a[0] * b[1] - a[1] * b[0]
|
|
};
|
|
}
|
|
|
|
public static double roundTo3Places(double n) {
|
|
return Math.round(n * 1000d) * 0.001;
|
|
}
|
|
|
|
public static double[] createIdentityMatrix() {
|
|
double[] res = new double[16];
|
|
resetIdentityMatrix(res);
|
|
return res;
|
|
}
|
|
|
|
public static double degreesToRadians(double degrees) {
|
|
return degrees * Math.PI / 180;
|
|
}
|
|
|
|
public static void resetIdentityMatrix(double[] matrix) {
|
|
matrix[1] = matrix[2] = matrix[3] = matrix[4] = matrix[6] = matrix[7] = matrix[8] = matrix[9] =
|
|
matrix[11] = matrix[12] = matrix[13] = matrix[14] = 0;
|
|
matrix[0] = matrix[5] = matrix[10] = matrix[15] = 1;
|
|
}
|
|
|
|
public static void applyPerspective(double[] m, double perspective) {
|
|
m[11] = -1 / perspective;
|
|
}
|
|
|
|
public static void applyScaleX(double[] m, double factor) {
|
|
m[0] = factor;
|
|
}
|
|
|
|
public static void applyScaleY(double[] m, double factor) {
|
|
m[5] = factor;
|
|
}
|
|
|
|
public static void applyScaleZ(double[] m, double factor) {
|
|
m[10] = factor;
|
|
}
|
|
|
|
public static void applyTranslate2D(double[] m, double x, double y) {
|
|
m[12] = x;
|
|
m[13] = y;
|
|
}
|
|
|
|
public static void applyTranslate3D(double[] m, double x, double y, double z) {
|
|
m[12] = x;
|
|
m[13] = y;
|
|
m[14] = z;
|
|
}
|
|
|
|
public static void applySkewX(double[] m, double radians) {
|
|
m[4] = Math.tan(radians);
|
|
}
|
|
|
|
public static void applySkewY(double[] m, double radians) {
|
|
m[1] = Math.tan(radians);
|
|
}
|
|
|
|
public static void applyRotateX(double[] m, double radians) {
|
|
m[5] = Math.cos(radians);
|
|
m[6] = Math.sin(radians);
|
|
m[9] = -Math.sin(radians);
|
|
m[10] = Math.cos(radians);
|
|
}
|
|
|
|
public static void applyRotateY(double[] m, double radians) {
|
|
m[0] = Math.cos(radians);
|
|
m[2] = -Math.sin(radians);
|
|
m[8] = Math.sin(radians);
|
|
m[10] = Math.cos(radians);
|
|
}
|
|
|
|
// http://www.w3.org/TR/css3-transforms/#recomposing-to-a-2d-matrix
|
|
public static void applyRotateZ(double[] m, double radians) {
|
|
m[0] = Math.cos(radians);
|
|
m[1] = Math.sin(radians);
|
|
m[4] = -Math.sin(radians);
|
|
m[5] = Math.cos(radians);
|
|
}
|
|
}
|